Introduction

¿QUÉ ES?
Un coche autónomo es aquel que cuenta con los sistemas informáticos necesarios para imitar las capacidades humanas en cuanto a la conducción, tanto por manejo como por control. A priori, se consideran vehículos autónomos aquellos que no necesitan conductor; sin embargo, el concepto sigue evolucionando y hay varios niveles de conducción autónoma.
Los coches autónomos son capaces de percibir el entorno que lo rodea y, en base al análisis del mismo, aplicar técnicas de conducción. En esto, sus ocupantes pueden elegir el destino al que se dirija el vehículo, pero no es necesario que tomen ningún tipo de acción sobre la conducción.
Task
| Nivel 0: Control humano. | El funcionamiento del automóvil depende totalmente del conductor humano. Aquí se incluye a automóviles equipados con diferentes dispositivos para advertir al conductor de situaciones concretas, como el nivel de combustible. |
| Nivel 1: Asistencia al conductor. | En este nivel, el automóvil incorpora tecnologías como el frenado autónomo de emergencia (AEB) o la regulación de velocidad, para asistir al conductor. Las tecnologías no pueden funcionar de manera simultánea. |
| Nivel 2: Automatización parcial. | El automóvil puede controlar al menos dos funciones automáticas de manera simultánea. Por ejemplo, sistemas autónomos de aceleración y dirección asistidas para ayudar al conductor. El conductor humano debe controlar el vehículo en todo momento. |
| Nivel 3: Autonomía condicional. | El vehículo es capaz de gestionar todas las funciones críticas de seguridad en determinadas condiciones, pero el conductor debe asumir el control cuando se produzca una alerta. El conductor debe permanecer atento incluso con el vehículo en modo autónomo. |
| Nivel 4: Autonomía predefinida. | El automóvil es totalmente autónomo en algunos escenarios de conducción, no en todos. El vehículo es totalmente autónomo en entornos predefinidos, sin requerir la intervención de un conductor humano. |
| Nivel 5: Totalmente autónomo. | El automóvil es completamente capaz de circular por sí solo en cualquier situación y en cualquier lugar, sin intervención de un conductor. |
"En 2014, la Sociedad de Ingenieros Automotrices (SAE) publicaba su escala de automatización, que contempla seis niveles: Se trata de una escala que va del 0 a 5, donde el nivel 0 se reserva para vehículos que dependen absolutamente del conductor, mientras que el nivel 5, por el contrario, indica una autonomía total en cualquier entorno. El resto de valores se utilizan para indicar niveles intermedios de autonomía.
https://www.motor.es/que-es/coches-autonomos
(CLICK PARA MÁS INFORMACIÓN)
Process
CARACTERÍSTICAS
- No cuentan con pedales
- Cuentan con un cerebro virtual (el encargado de identificar la situación y, entonces, accionar).
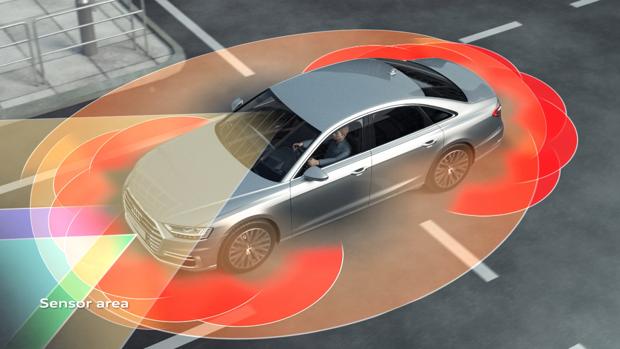
- Tienen sensores, cámara y radares, dichos sensores pueden ver en 360ª con un alcance amplio, aproximadamente la distancia es de dos campos de fútbol. Pueden detectar objetos en todas las direcciones.
- Pueden ver el camino sin importar el clima (lluvia, niebla o nieve). GPS, mapas en 3D.
- Visión computerizada, normalmente su forma es redonda para maximizar el campo de visión.
- Baterías electrónicas para poder accionar el vehículo.
- Sensor frontal que mide la velocidad de los vehículos que están delante de este coche.
 |
|

|
Componentes Software |
Componentes Hardware |
|---|---|
| Cada una de las imágenes se asocia con el tipo de vehículo que contiene. El algoritmo de Machine learning, se “entrena” con distintas imágenes que ejemplifican todas las situaciones posibles, empieza a procesar las imágenes. Inicialmente, intenta adivinar que vehículo hay en cada imagen y al principio se equivocará muy a menudo. Como conoce “la solución”, es decir, que vehículo hay en realidad en cada imagen, modifica y adapta parámetros internos y lo vuelve a intentar. El proceso continua reduciendo iterativamente la tasa de fallos. Más adelante, cuando se le presenten nuevas imágenes podrá clasificarlas correctamente. Podemos, entonces, afirmar que el algoritmo ha aprendido. | Con el objeto de poder tomar decisiones acertadas, el coche necesita recopilar toda la información disponible en su entorno. Para ello, los coches autónomos cuentan con una serie de sensores y cámaras que permiten la captación de información. Más concretamente, cada vehículo suele estar equipado con una unidad GPS, un sistema de navegación inercial, y una serie de sensores: medidores láser, un radar, un lidar y vídeo. |
ELEMENTOS PRINCIPALES
1. Conectividad
Los vehículos están compuestos de muchas partes que se mueven, y todas tienen que poder funcionar juntas. Algunas están conectadas por cables; otras, de forma inalámbrica, y la latencia es absolutamente crítica. Los sistemas que conducirán el vehículo del futuro tendrán que pasar muchas pruebas de estrés que garanticen su confiabilidad y rendimiento, y será necesario controlarlos de forma constante para evitar los cuellos de botella.
2. Inteligencia
El vehículo del futuro también tiene que ser inteligente. Los sistemas de conducción autónoma tienen que poder diferenciar entre una bicicleta y una motocicleta, o entre una señal de tránsito y un peatón. También deberán tener en cuenta las interferencias en los sensores que puedan ocurrir a causa de la niebla, la lluvia o el viento, así como cuestiones de la línea de visión. Los vehículos autónomos también deberán ser capaces de aprender con la práctica gracias al aprendizaje automático, y adaptarse a su entorno y a otros vehículos a lo largo de su ciclo de vida.
3. Alimentación
El vehículo del futuro no dependerá de combustibles fósiles. El desarrollo de tecnologías de baterías seguirá avanzando, a fin de proveer fuentes de energía limpias, renovables y confiables para los vehículos autónomos. Se espera que en los próximos cinco años, el costo de las baterías de iones de litio esté por debajo de los 100 dólares por kWh. Ya se están desarrollando otras tecnologías, como las baterías de litio-aire y las baterías de iones de litio de estado sólido. También en estos casos, será clave hacer las pruebas necesarias para que puedan funcionar de manera segura y eficaz.
4. Ciberseguridad
Quizás lo más importante de todo es que el vehículo del futuro sea seguro. Desafortunadamente, hasta los sistemas informáticos más sólidos son vulnerables a los ciberataques y, hasta que se demuestre lo contrario, es posible pensar que podría haber personas con malas intenciones que intenten conseguir el control de estos vehículos. Los operadores tendrán que monitorear constantemente los sistemas autónomos para detectar vulnerabilidades. En vez de adoptar medidas de defensa —lo que demostró ser prácticamente imposible—, los operadores de vehículos autónomos tendrán que escudriñar el sistema en busca de comportamientos anormales o inesperados.
FUNCIONAMIENTOS DE LAS HERRAMIENTAS
Las diversas tecnologías de las que hablaremos luego, poseen un objetivo común, recoger información para de esta forma producir un modelo virtual del ámbito, conociendo tal cual dónde se hallan los objetos fijos, como barreras o bordillos, y objetos en desplazamiento, como en la situación de peatones o ciclistas. Estas resoluciones tecnológicas se fundamentan en varios sensores, que tienen la posibilidad de laborar independientemente o de manera conjunta para aumentar la redundancia. Las tecnologías más empleadas actualmente y que se emplearán en el futuro próximo son RADAR, LIDAR, Sensores de ultrasonidos y Cámaras.
1. Cámaras
Los sistemas con cámaras buscan el reconocimiento del ámbito por medio de el procesamiento de la imagen, percibiendo tal cual colores, texturas y maneras. Las cámaras suministran una más grande proporción de información, empero muestran el reto del procesado de dichas imágenes para el reconocimiento de los objetos o los recursos del ámbito.
2. LIDAR
Sus siglas provienen de LASER Imaging Detection and Ranging, siendo la palabra LASER paralelamente un acrónimo cuyo sentido es Light Amplification by Simulated Emission of Radiation. Hablamos de un sistema de medición y detección de objetos por medio de un haz pulsado de LASER. La medición se establece calculando la época de retraso entre la emisión del pulso y la detección de la señal reflejada.
Los sistemas LIDAR son capaces de ver una cantidad enorme de puntos de vista por segundo. Debido a esto, los vehículos dotados con esta clase de tecnologías, son capaces de detectar marcas viales, objetos móviles, fronteras de la vía o inclusive el espacio independiente para la circulación. Esta tecnología nos aporta monumentales ventajas, como por ejemplo la obtención de información 5D (X, Y, Z, magnitud y tiempo), sin embargo además muestra ciertos inconvenientes actualmente como la modificación en la aerodinámica del transporte, aún cuando permanecen procurando de ser subsanados

3. RADAR
Sus siglas significan Radio Detection and Racing, lo cual traducido al español es detección y medición (de distancias) por radio. El sistema se fundamenta en la emisión de un fomento de ondas electromagnéticas a bastante alta frecuencia, las cuales se reflejan en el objeto, recibiéndose típicamente en la misma postura. La utilización de distintas longitudes de onda posibilita identificar objetos de distintas naturalezas, siendo capaz de identificar hasta luz visible o sonidos. Implementado en vehículos, este sistema sirve para identificar la distancia, el ángulo y la rapidez de un objeto, empero es incapaz de detectar el objeto del que se trata. Al ser una tecnología madura, da sitio a poco margen de optimización. Sin embargo, otorga suficiente información para el desarrollo de sistemas como el control de crucero adaptativo, la alerta de colisión frontal o el control de la distancia de estabilidad entre otros.

EL LANZAMIENTO DE 5G
Las redes 5G permiten conexiones de banda ancha ultrarrápidas, y van a ser capaces de conectar sensores viales a Internet y ejercer tecnologías para contribuir a precipitar la toma de elecciones en los carros garantizando una más grande estabilidad. Esto involucra que la instalación de sensores en las carreteras y la construcción de una infraestructura de “carreteras inteligentes” contribuirá a fomentar la fijación del transporte autosuficiente. Los sensores viales disminuirán la carga de procesamiento en los sistemas que incorporen los vehículos, por lo cual éstos no se verán forzados a gestionar tantas elecciones rápidas. Y esta clase de dispositivos puede, además, contribuir a evadir las interferencias que determinados materiales que se usan en el firme de las carreteras generan sobre el desempeño de los sensores que equipan los carros.

Conclusion
Para concluir la revolución tecnológica va avanzando a pasos agigantados en todos los ámbitos ya sea en medicina, en telecomunicaciones, etc. Especialmente en el campo de los medios de transporte, en este caso el desarrollo tecnológico de los vehículos autónomos el cual poco a poco va ganando un espacio en el mercado de los autos ya que tienen como ventaja en facilitar la movilización de personas que tengan alguna discapacidad o para gente de avanzada edad que presentan varias dificultades especialmente con el sentido de la vista.

Credits
| --------------------------------------------------------------------------------------- | --------------------------------------------------------------------------------------- |
| Luis Mo 12°A | Kelly Feng 12°C |
|
|
|
| https://luismo3030.wixsite.com/website | https://kfeng688.wixsite.com/blog |